




My BLOG
TopPage




〜 ミスター・モデルベース開発 と呼ばれた男の独言 〜
ヘンジニア
-
41.モデルベース開発の歴史
(1) 1984年、スロットルバイワイヤ制御でMBDの開発は、はじまった。 油圧式ペンシルシリンダで位置制御をするものだったが、油の粘性が温度で10倍以上変わる難しい制御対象であったので、ロバストなシステム設計をするために極めて有益であったことを覚えている。
-
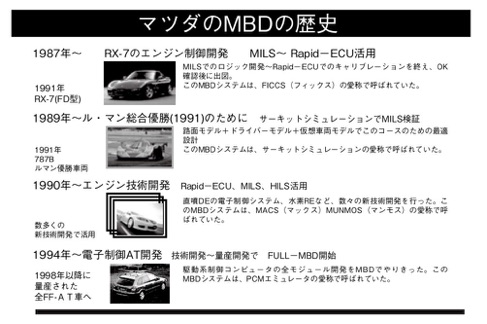
(2) 1987年、エンジン制御用のRapid-ECUを完全内製で開発した。複雑に見えるECUの周辺回路も分析すれば、10種程度の入力回路&出力回路に整理でき、これをあらかじめ備える構成とした。マイコンボードも内製である。このシステムは、FICCS (Function Integrated Composer with Control Symbol) と呼んだ。
(3) 1987年、制御用言語の開発も内製で行った。50種ほどの関数(現在でいう関数アイコン)の組み合わせだけで、自由にエンジン制御を開発出来る環境を構築した。こちらはエンジンだけでなく、変速制御もブレーキ制御も走り感制御もすべてを表現できる優れものだった。これらMBDツール群は、FICCS( Function Integrated Composer with Control Symbol) と呼ばれ、1991年に量産されることになるRX7(FD3S型ロータリーエンジン)の技術開発段階である1987年から活用された。当時、RX7は加速時のひどい振動で苦しんでいて、加速振動と逆位相でトルクを制御し、振動をピタッと止める点火アクティブ制御をモデルベースで取り組んだ。当該部分の制御ロジックの開発着手からキャリブレーション終了までを1週間でやりきった。当時、この作業は半年かかるのが普通だったため関係者を驚かせた。このとき、車の走行をシミュレートするシンプルモデルも作り、点火アクティブ制御の動作検証もモデルで行った。そのロジックをすぐに実車搭載出来た。振動はすぐに抑制出来たが、最後まで苦労したのは加速フィーリングだった。同乗したテストドライバーの駄目出しの意味を理解しながら、テストコース横に車を止めて10分で対策制御ロジックを作り、即実車確認することを数度繰り返した。1988年8月1日にこのFICCSでの仕事が成功したことを覚えている。
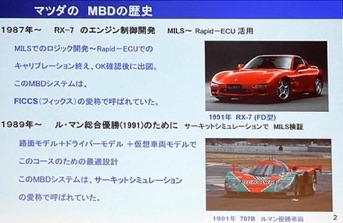
(4) 1989年から開発活用してきたMILSの最初の成功事例は、1991年ル・マン24時間レースにおける総合優勝車両の開発である。ル・マンのコース変更は1991年から実施と公表されたが、平時は一般道であるため、レーシングカーでの事前テストは出来ない。我々はル・マンの路面モデルを作り、この仮想コース上で、規定の燃料量内で一番早く走るためのエンジン~車両の設計を行った。最後に残った課題は、各ドライバー個人のばらつきでラップタイムに差が出ることであったが、コンピュータ上で一番早く走れる操作を最適化し、ドライバーにそれを模倣してもらった。最初、ドライバーたちは懐疑的であったが、国内のサーキット用に路面モデルを作り、その場所での実証実験で早く走れることが証明出来、納得してもらえた。このMBDツールはサーキットシミュレーション(CSS)と呼ばれた。(写真は ダッソーでの特別講演 のホームページから)

(6) 1990 年以降: MBD はディーゼルエンジン、 水素ロータリー、ATの開発でも広く活用された。 たとえば、Rapid-ECU はその後も進化&発展を継続し、MANMOS 、その進化版MACS というツールとして、様々な技術開発を支えた。
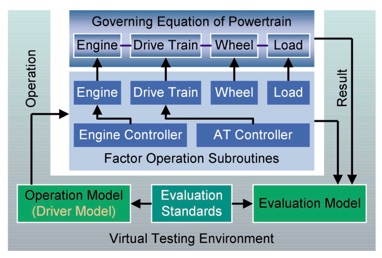
(7) 2012年、アイモデル iModel(Intelligent Model ) の誕生: PT-VTESの後継
思い返すと、我々のモデルベース開発は、1980 年代、 資源面で余力がなかったロータリー開発の中で生まれた。 世界中で誰も助けてくれない、普通のやり方では生き残れない、自分たちで革新しなければ消えて無くなるかもしれない、という危機感 の中から生まれてきたともいえる。 FICCS 〜 PT-VTES 〜 iModel 、これらのMBD開発ツールは、私たちのチーム内で35年間、開発継続されたもの。M社の MBD は、この長い長い歴史を継承している。
